Federico Zocco, Tzu-Chieh Lin, Ching-I Huang, Hsueh-Cheng Wang, Mohammad Omar Khyam, and Mien Van
Abstract
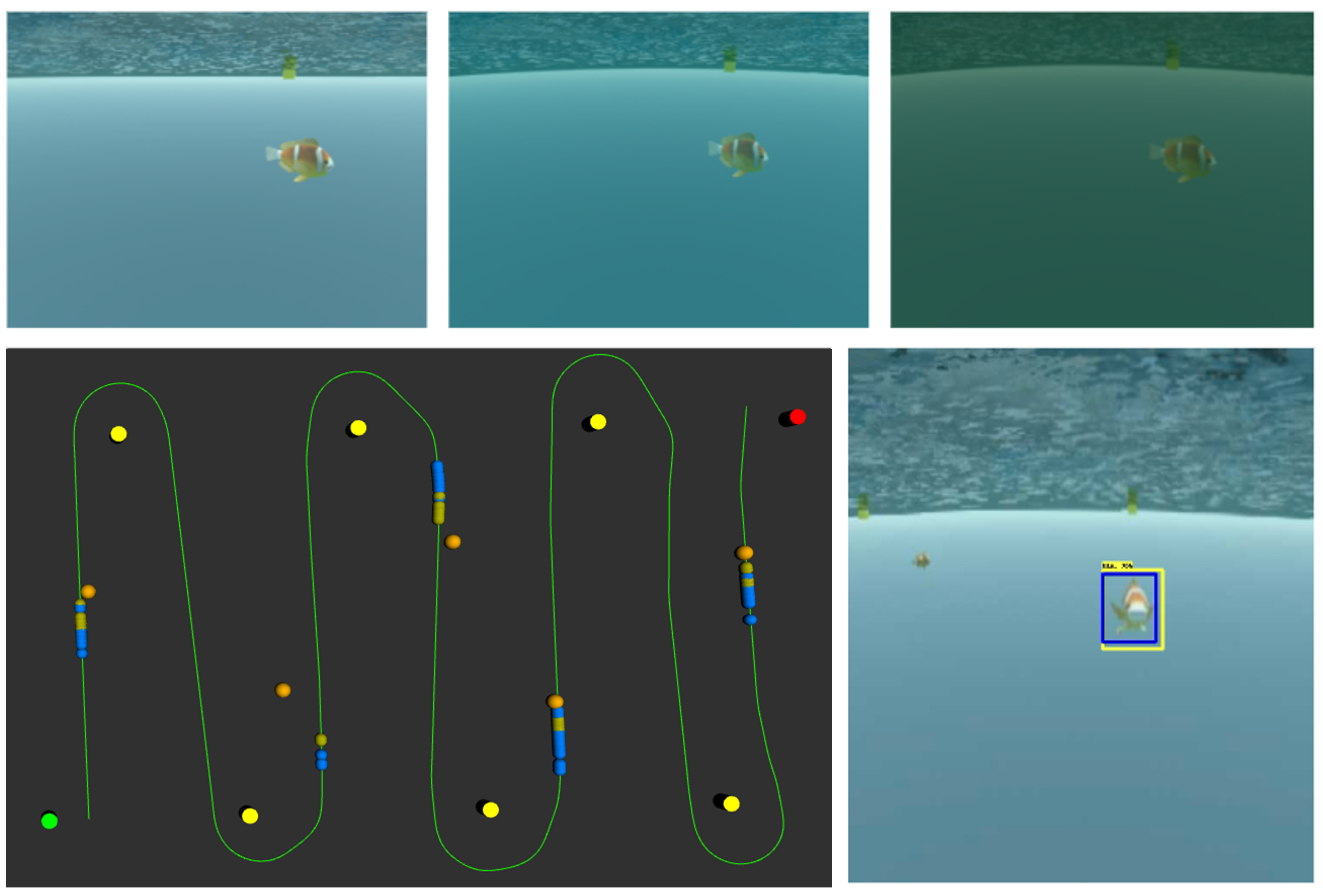
Marine debris is a problem both for the health of marine environments and for the human health since tiny pieces of plastic called “microplastics” resulting from the debris decomposition over the time are entering the food chain at any levels. For marine debris detection and removal, autonomous underwater vehicles (AUVs) are a potential solution. In this letter, we focus on the efficiency of AUV vision for real-time marine debris detection. First, we improved the efficiency of a class of state-of-the-art object detectors, namely EfficientDets [1], by 1.5% AP on D0, 2.6% AP on D1, 1.2% AP on D2 and 1.3% AP on D3 without increasing the GPU latency (see Fig. 1). Subsequently, we created and made publicly available a dataset for the detection of in-water plastic bags and bottles and trained our improved EfficientDets on this and on two public datasets for marine debris detection. Finally, we began the testing of real-time detection performance on a simulator of marine environments. Source code and dataset are publicly available. https://arg-nctu.github.io/projects/efficientdet.html
Video
Bibtex
@ARTICLE{zocco-2023-efficient-marine-debris ,
author={Zocco, Federico and Lin, Tzu-Chieh and Huang, Ching-I and Wang, Hsueh-Cheng and Khyam, Mohammad Omar and Van, Mien},
journal={IEEE Robotics and Automation Letters},
title={Towards More Efficient EfficientDets and Real-Time Marine Debris Detection},
year={2023},
volume={8},
number={4},
pages={2134-2141},
doi={10.1109/LRA.2023.3245405}
}
Acknowledgments
This work was supported by the Natural Environment Research Council, United Kingdom [grant number NE/V008080/1] and by Taiwan’s National Science and Technology Council (grants 111-NU-E-A49-001-NU, 110-2221-E-A49-124, and 111-2623-E-A49-007). This work was funded in part by Qualcomm through the Taiwan University Research Collaboration Project. (Corresponding author: Mien Van)