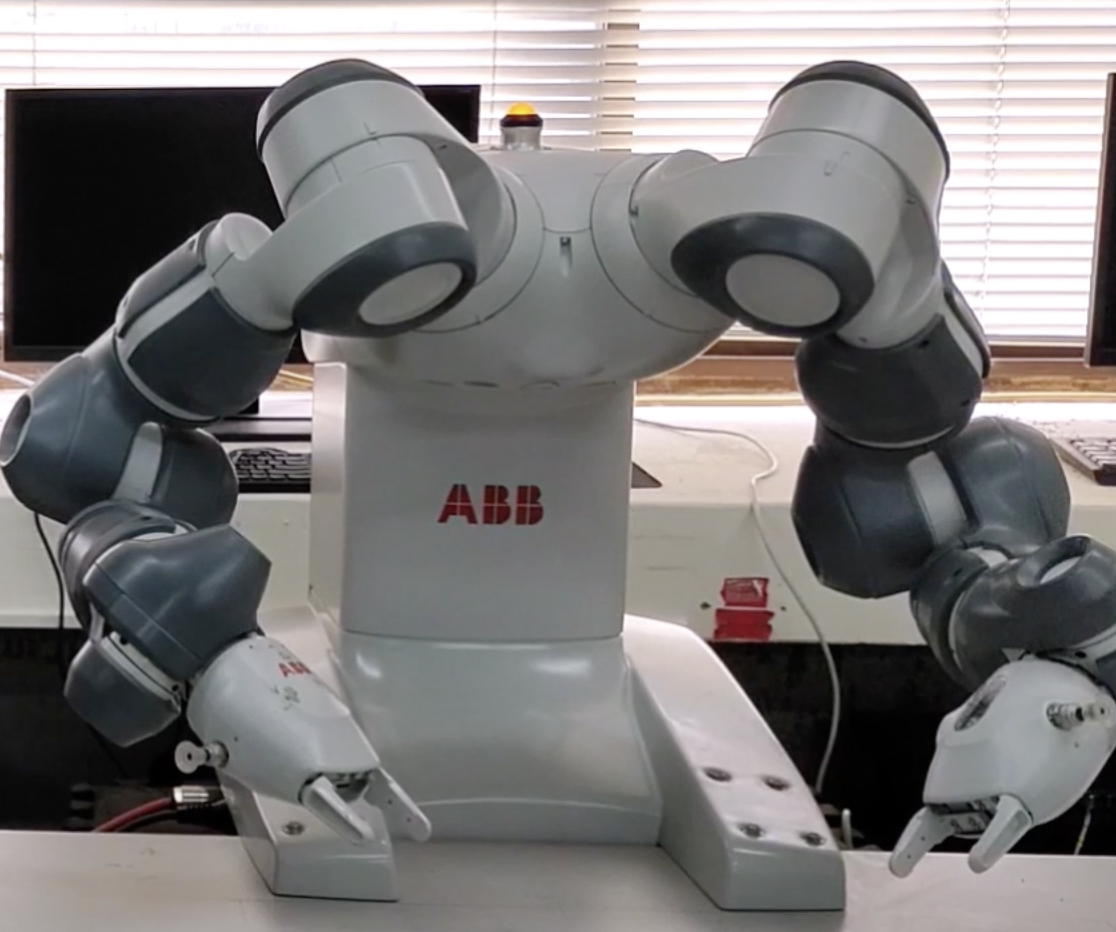
Yumi 2021
We will regularly upload unboxing videos for our robots. The video is in introductory level for novice in high school or university students. For research level results, please check our Research page.

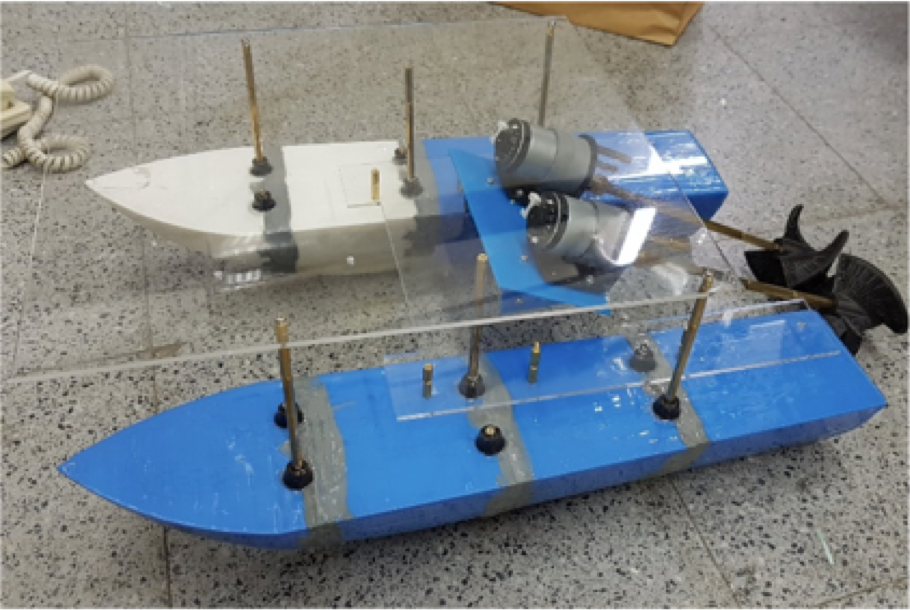
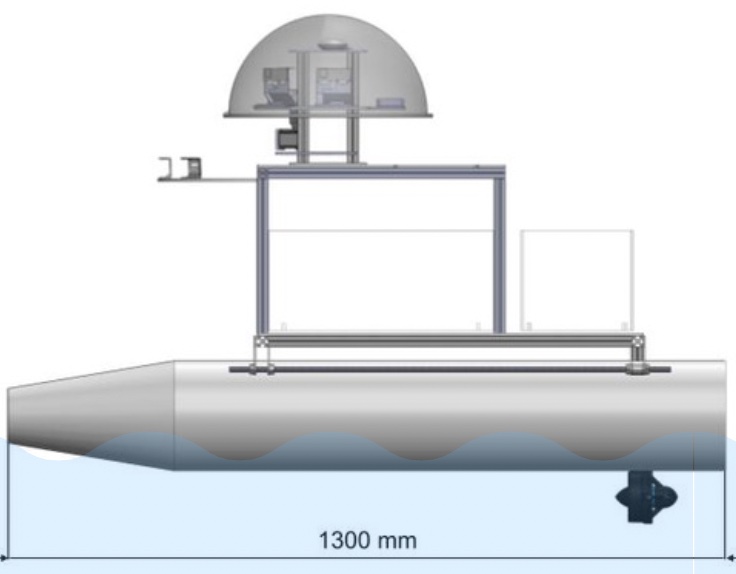
Duckieboat is inspired by the Duckietown platform for low-cost robotics education and research. Duckieboat was first initiated in 2017 and published in 2019 (in IROS conference). We will introduce the 2021 version, including the network, power, and autonomy boxes (all enclosed in waterproof containers). We will also briefly introduce the waypoint navigation and track and trail functionalities.
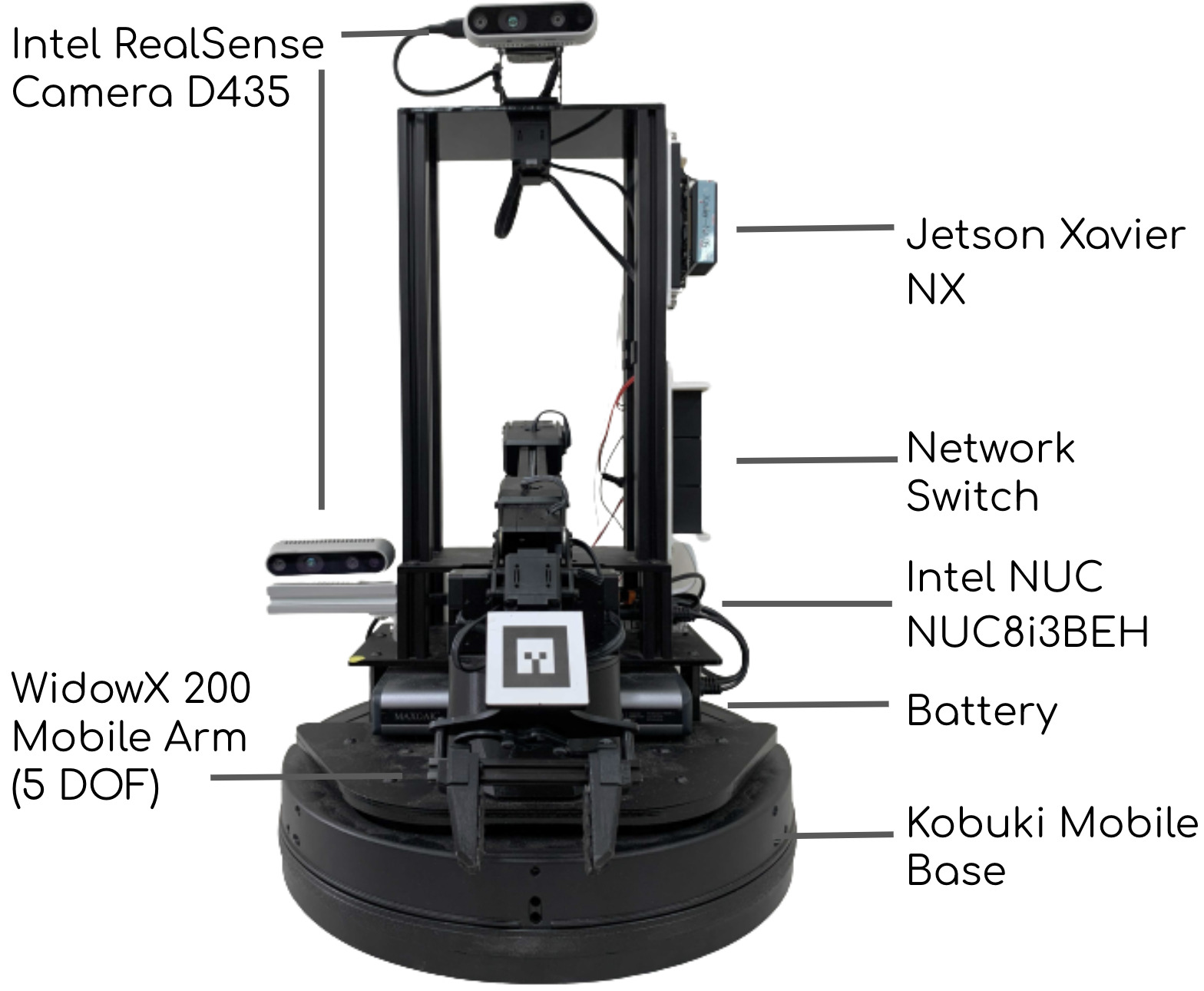
LoCoBot was first designed by CMU and the Facebook AI Research (FAIR). Our lab received two LoCoBots as gifts from FAIR. In the video we will introduce the basic components of LoCoBot and the integration with Unity system. We hope that the low-cost robots and VR will be a big role in the metaverse!
The mobile manipulator has been used for the participation of the DARPA SubT Challenge.

UR5 is provided by the Robotics Institute @ NCTU to support robotic manipulation education and research.

The mobile manipulator was used in the MIT 2.12 course , and later adapted in NCTU. Thanks to Peter Yu for initialing the robot and course material development as well as support for NCTU courses.

NCTU was awarded the WAM-V to the 2018 RobotX Challenge by Association for Unmanned Vehicle Systems International (AUVSI).

A Duckiebot contains a wide-angle camera, a processing unit (Raspberry Pi 2/3), and motors, and is able to follow lanes while avoiding obstacles, pedestrians (duckies) and other Duckiebots, localize within a global map, navigate a city, and coordinate with other Duckiebots to avoid collisions.
Duckietown Detail. Duckietown in MIT 2016.
Duckieboat is inspired by Duckiebot, and is designed to promote the education and research for autonomous surface vehicles.