Abstract
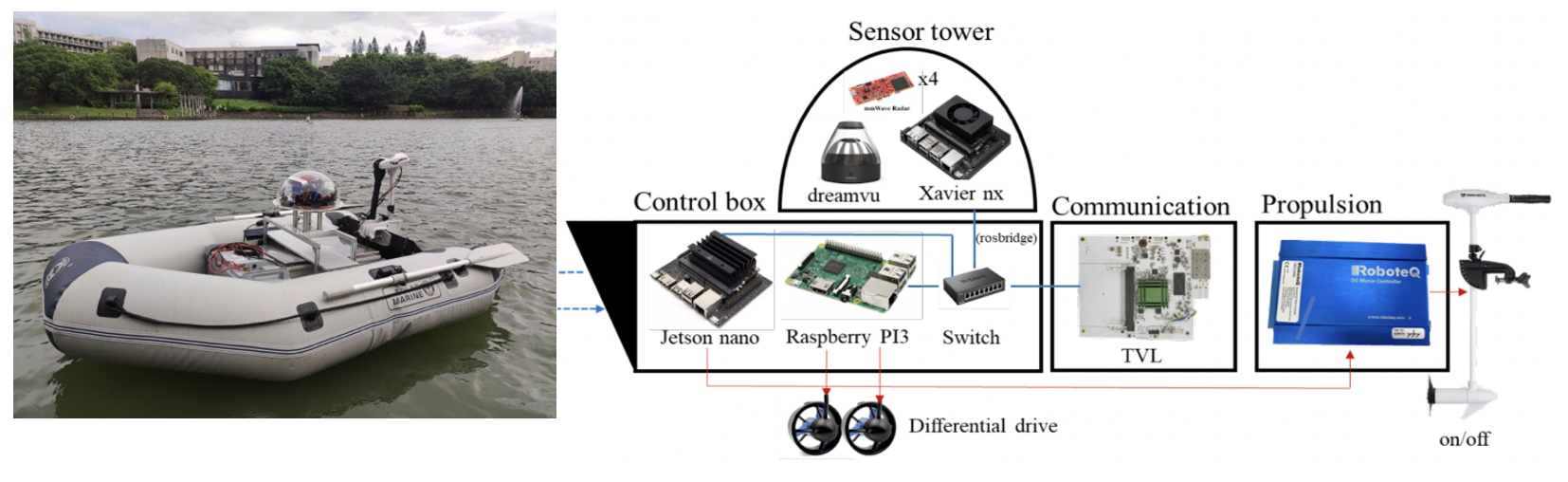
Duckiepond 2.0 extends the education and research environment Duckiepond, including an accessible “Duckieboat” platform and simulation environments (Gazebo and Unity). Duckieboat (DBT22) is built upon commercially available inflatable boats and outboard motors. The modularity designs of sensor tower, autonomy box, and communication module (DuckieAnchor) can be deployed on heterogeneous autonomous surface vehicles, providing longer communication ranges and hardware-in-the-loop (HIL) developments. Duckiepond 2.0 inherited the recent efforts of the Duckietown platform for flexible fleet managements, such as the Duckietown Shell commands. Duckiepond 2.0 continues the supports of MOOS-ROS bridge, and further develop PyIvP (Python binding of the IvP C++ code) and non-ROS WebSocket as autonomy education materials for wider uses of the communities. The Gazebo simulation provided by Virtual RobotX (VRX) consists of physical engines of realistic vehicle dynamics and high fidelitous current, wind and sensors streams, which are used to develop deep reinforcement learning algorithms of collision avoidance, navigation, and docking. Lastly, Duckiepond 2.0 considers “supervised autonomy” by including virtual reality (VR) interactions with a human supervisor at base station. The proposed VR interface is based on a consumer-grade device (Oculus Quest 2) with one or more Duckieboats to allow easy replication and set up. Virtual representations of the Duckieboats and surrounding objects in the real-world presented in VR can be used by a single human supervisor to control the entire heterogenous maritime fleet for search and rescue missions.