Abstract
This paper describes the architecture and implementation of a heterogeneous team comprising unmanned ground vehicles and blimp robots capable of navigating unknown subterranean environments for search and rescue missions. The ground vehicles are equipped with a range of sensors for accurate perception, localization, and mapping. The blimps feature a long flight duration and collision tolerance when traversing uneven terrain. The design of the system was meant to satisfy the requirements of the DARPA Subterranean Challenge in terms of perception capability and autonomy. To facilitate navigation through smoke-filled spaces, we employed novel millimeter wave radar to enable cross-modal representations for integration via deep reinforcement learning. The autonomy of the proposed scheme was augmented using simulations to train deep neural networks, thereby allowing the system to perform sequential decision-making for collision avoidance and navigation toward a specific goal. The navigation system was evaluated in the DARPA SubT Urban Circuit, and quantitative localization results and recovery strategy from failures was discussed. The proposed communication system comprises mesh WiFi with XBee and UWB communication modules as well as spherical nodes that can be shot out like a cannonball and miniature cars deployed as mobile nodes. The propagation and radio signal strength index of various modules were evaluated using data collected during field tests in order to overcome the uncertainties of subterranean environments, including non-line-of-sight propagation, multipath propagation, and fading reception. We also discuss the lessons learned during this project and reflect on future plans.
Video
Overall System Performance
The competition scoring metric was that a valid artifact report earns the team one point, if the artifact type was correct and the reported location was less than or equal to five meters (Euclidean distance) from the ground truth location, as shown in Figure 16. Since any artifact report out of the error range did not earn any points, the localization and mapping accuracy was critical to the score. We quantitatively evaluated the localization and mapping accuracy during the competition runs of the Alpha course in the Urban Circuit.
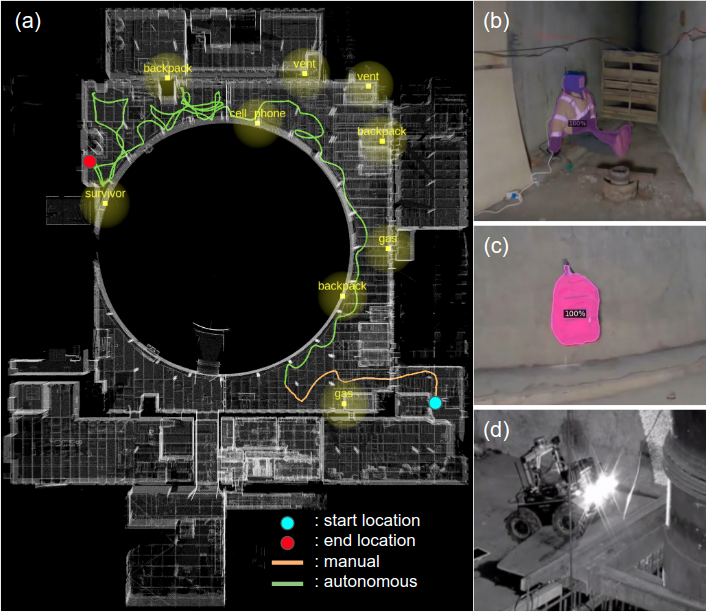
Figure 16: The overall system performed in the Satsop Nuclear Power Plant in Elma, Washington, USA, from DARPA Subterranean Challenge Urban Circuit Alpha Run. (a) Ground truth map with robot trajectory. The UGV autonomously traversed 277.53 m (green line) for 23 minutes using the proposed learning-based navigation. The artifacts and their 5-meter range for scoring were shown in yellow dots. (b) and (c) were the artifacts correctly detected from our robot. In the end the UGV got stuck at a ledge (red dot in (a)), also shown in (d). The robot trajectory was plotted by matching onboard LiDAR point cloud and the ground truth map provided by DARPA (white points) using the General Iterative Closet Point (ICP) algorithms for quantitative evaluations.

Table 10: Mean (µ) and standard deviation (σ) of odometry errors estimated by LeGO-LOAM before and after rapid jumps (R.J.), and by recovery.
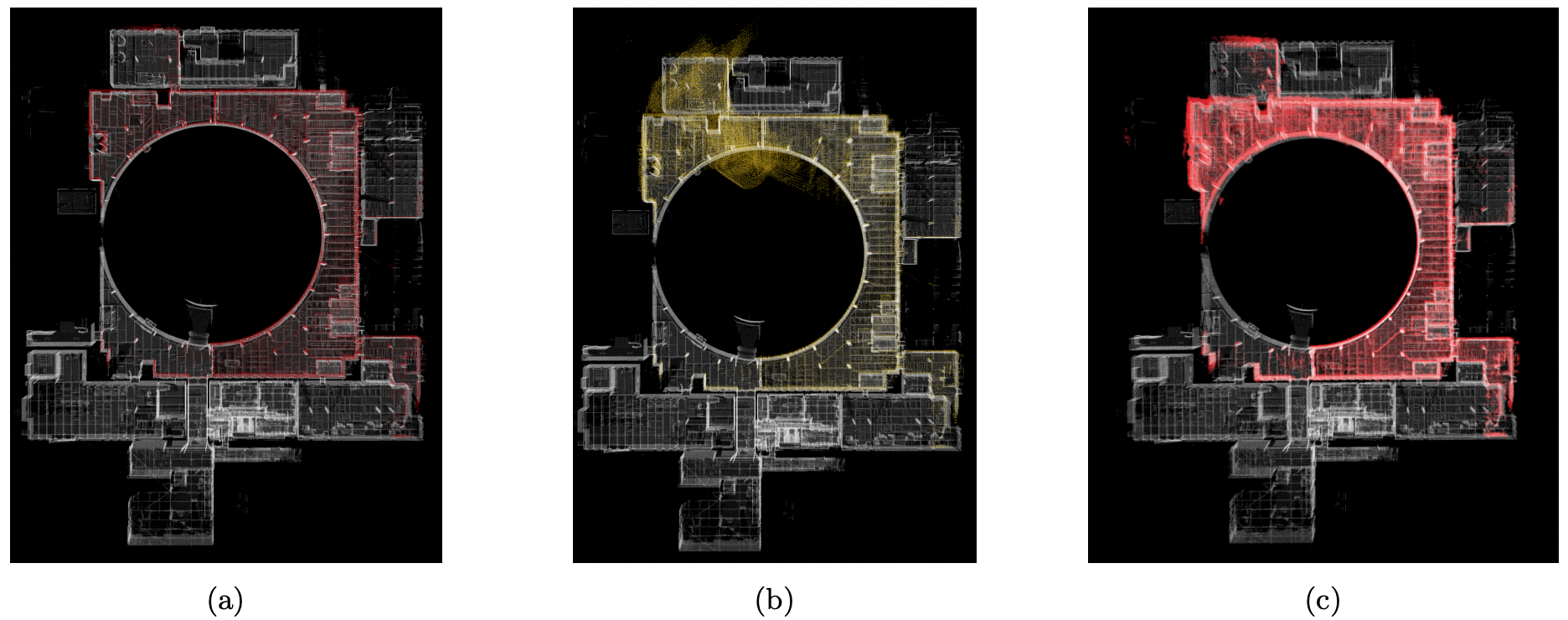
Figure 17: Comparison of the ground truth map (white) and the estimated maps (colored) generated by LeGO-LOAM algorithm. (a) Before rapid jump. (b) After rapid jumps. (c) Recovered map by confidence tests and recovery.
Artifacts Search Datasets
We provide around 6000 ground truth labels for semantic segmentation benchmark of artifacts extracted from the DARPA released rosbags. The original rosbags were collected by DARPA and can be found here
Click on the link to download compressed images and json files.
| # | Route | Rosbag | Environment | Data | # Images | Thumbnail |
|---|---|---|---|---|---|---|
| 1 | Tunnel Experimental | Link | Mine Tunnel | 1063 |  |
|
| 2 | Tunnel Safety Research I | Link | Mine Tunnel | 632 |  |
|
| 3 | Tunnel Safety Research II | Link | Mine Tunnel | 929 |  |
|
| 4 | Urban Alpha Course I | Link | Nuclear Power Plant | 688 |  |
|
| 5 | Urban Alpha Course II | Link | Nuclear Power Plant | 1718 |  |
|
| 6 | Urban Beta Course II | Link | Nuclear Power Plant | 927 |  |
Supplementary Materials
Communications must be maintained at all times among heterogeneous robots, anchor nodes, and humansupervisors. Without a clear understanding of radio propagation characteristics in SubT environments, there is no way to determine the optimal deployment strategy, and particularly in locations with a complexgeometric structure. we collected radio propagation data from XBee and UWB modules in various underground environments, including a long artificial tunnel, Shimen tunnel, a natural sea cave, BH cave. RSSI of XBee and UWB along the trajectory are recorded below. The color segments and label in the bottom of the figures are correspond to the colored segments of trajectory in the maps.
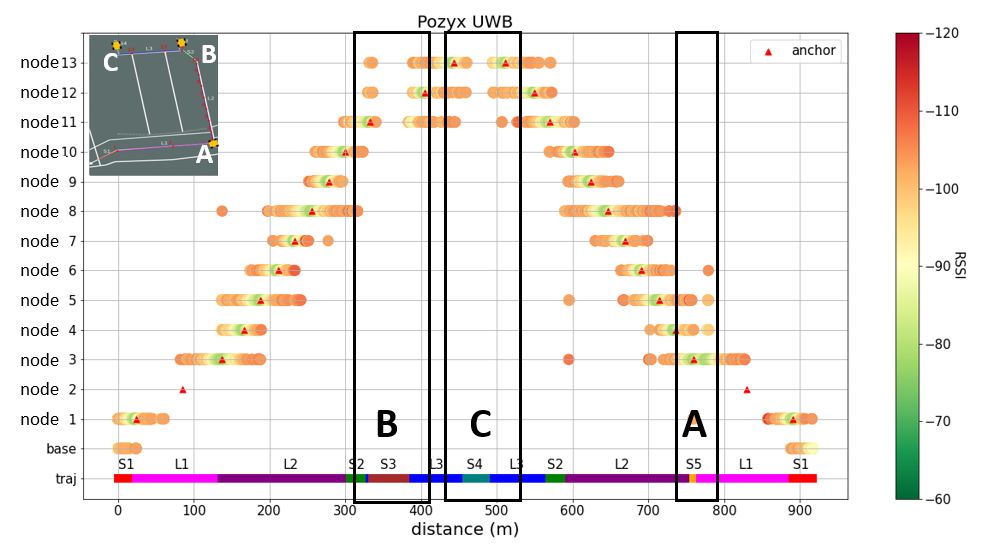
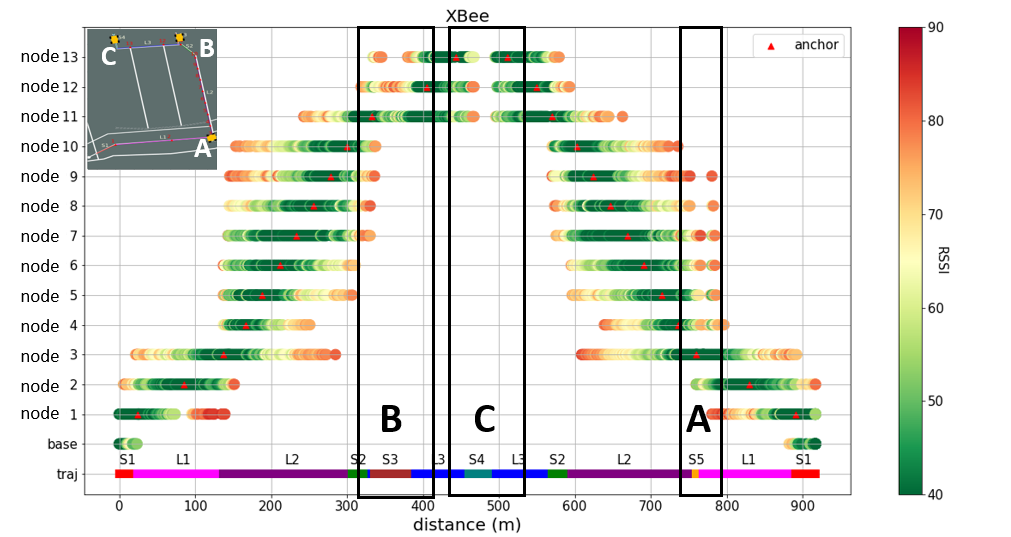
RSSI of XBee and UWB along the trajectory in Shimen tunnel. The color segments and label at the bottom of figures are correspond to the colored segments in the map of Shimen Reservoir. When the robot at S3, S4, and S5, the locations of nodes were at NLOS of the robot. This caused to weak link. As shown in block A, B and, C, the robot disconnected to almost all the nodes and was out of the meshes. Hence, we advice the node should be deployed at all the intersections, not only to maintain the quality of link, but to save the number of the nodes. According to this experiments, the average communication coverage of UWB and XBee at LOS are 55 and 106 m respectively. This would be a trick for the strategy of deployment for this kind of narrow tunnel. To be noticed that there were some UWB data with wrong distance information (L2: node \#7 and \#8; S2: node \#4 and \#5; S5: node \#1). The reason may be that huge number of the node in the narrow space caused multiple-path propagation. (The UWB signal of node \#2 was missed in the testing.)
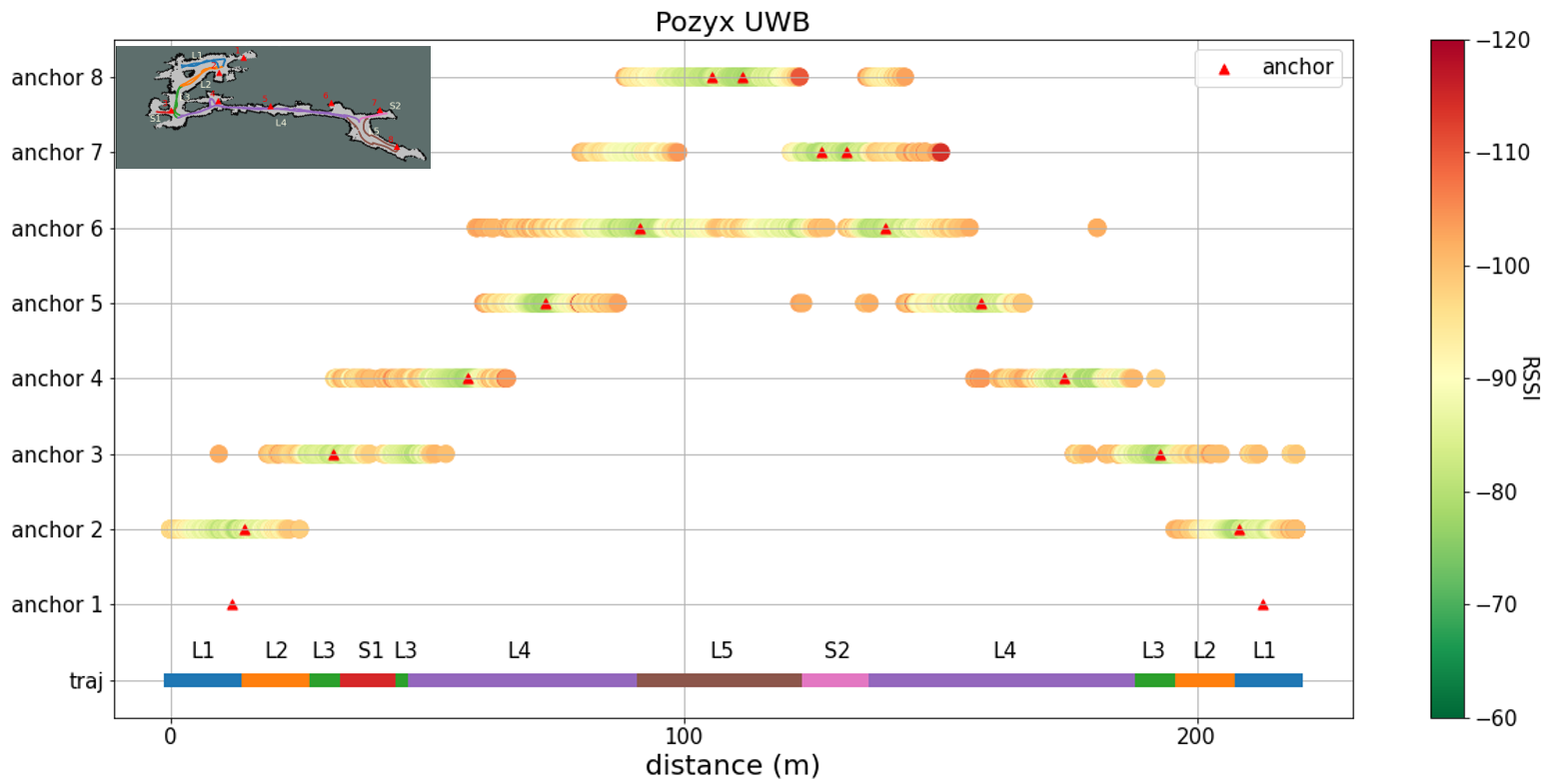
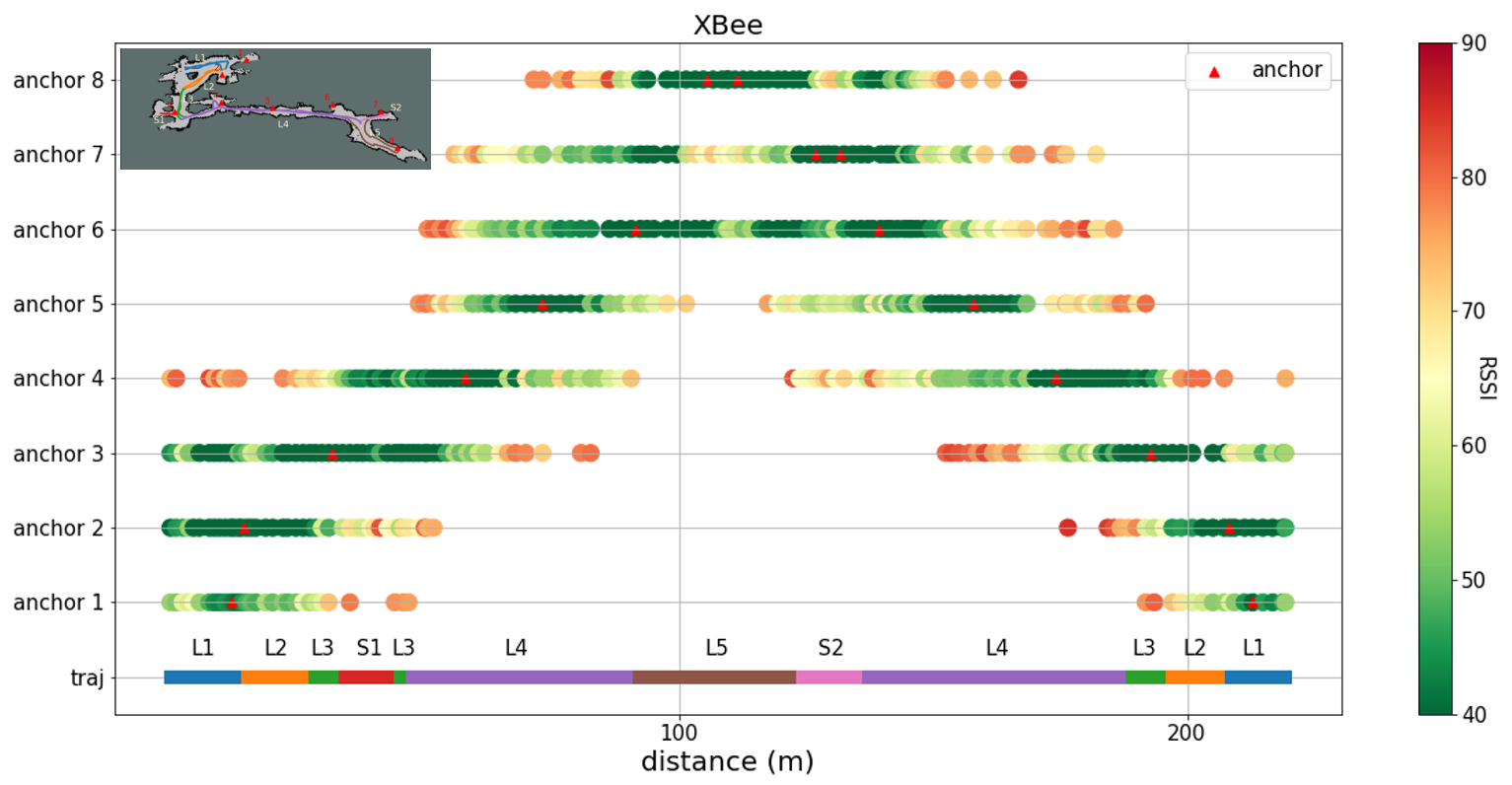
RSSI of XBee and UWB along the trajectory in BH cave. The UWB signals are hard to transmit at NLOS. The UWB signals gave wrong distance data only once (at the end of L1: node \#3). The reason might be that wider space decrease the probability of multi-path propagation. The coverage of UWB was 32 m (L4: node \#6). Due to the small scale of the environment, the communication coverage of the XBee modules covered almost all BH cave.)
Bibtex
@article{lu2021heterogeneous,
title={A Heterogeneous Unmanned Ground Vehicle and Blimp Robot Team for Search and rescue Using Data-Driven Autonomy and Communication-Aware Navigation},
author={Lu, C and Huang, C and Huang, J and Hsu, C and Chang, P and Ewe, Z and others},
journal={Field Robotics},
year={2022},
}