
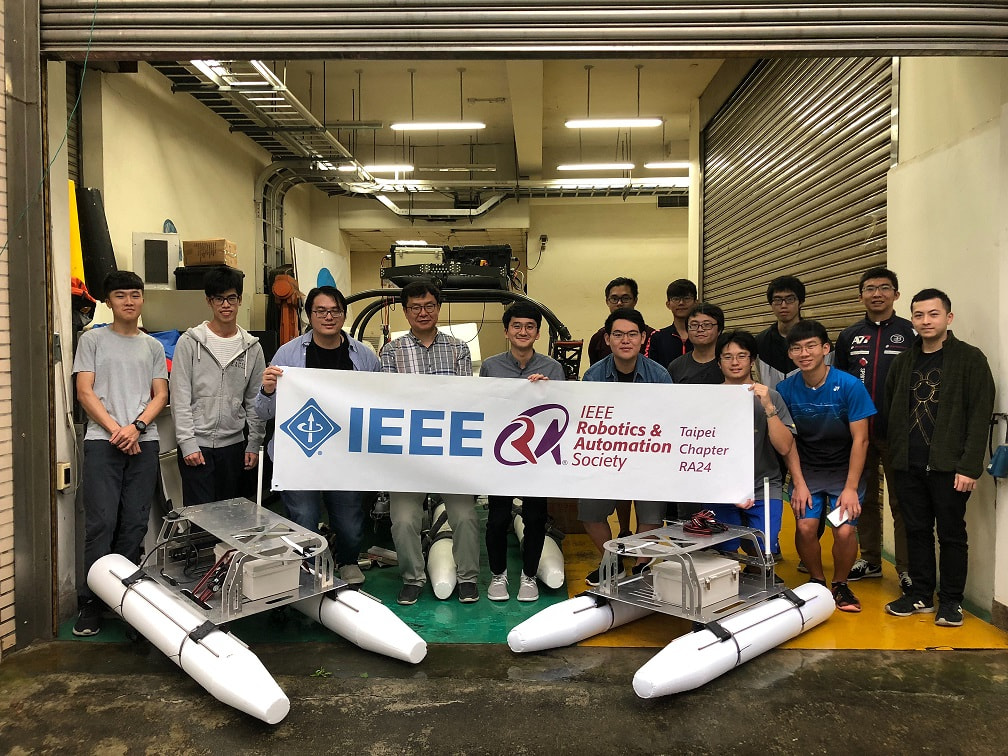
Team NYCU, the only Taiwanese delegation, will compete 2022 Maritime RobotX Challenge in Sydney, Australia. The Maritime RobotX Challenge is initiated by the US Office of Naval Research (ONR) since 2012, and organized by RoboNation and the Association for Unmanned Vehicle Systems International (AUVSI) in 2014, 2016, and 2018. The goal of the competition is to complete tasks including passing through gates, obstacle avoidance, docking, underwater ring recovery, etc. Team NCTU received “the best single day” award by completed 4 tasks in one day. AUVSI awarded our team (previously known as Team NCTU) a Wave Adaptive Modular Vessel (WAM-V) in December 2017. The WAM-V is manufactured by Marine Advanced Research and costed 75,000 USD. With the same given vehicles, each team should design and implement the perception, computation, and propulsion systems of the autonomous maritime system in order to be able to participate in the competition. In 2018, among the 15 international teams participated, our team had entered the final round and eventually won the fifth place in the competition. Our team was the best performance team among the teams that were participating for the first time. Team members are composed of graduate and undergraduate students from Department of Electrical and Computer Engineering, Institute of Electrical and Control Engineering, and the Robotics Institute, supervised by Prof. Hsueh-Cheng Nick Wang. Our work is built upon multi-year participations of international robotics competitions, including the RobotX and DARPA Challenges, we wish to further develop modular-designed USV fleet and learning-based research. By joining this international competition, students had learnt hands-on experiences, team building and problem solving. We aim at developing cutting-edged technologies jointly with industrial partners to create values.
If you are interested, please visit our ARG-NCTU website
(EE627)1001 University Road, Hsinchu,
Taiwan 30010, ROC
Julie Ko
yutingk.ee11@nycu.edu.tw

Duckiepond 2.0 is an education and research environment, consisting of a fleet of heterogeneous surface vehicles and a VR-based human robot interface. The modularity designs of hardware are extended from our previous participations of Maritime RobotX and DARPA SubT Challenges. The multi-modal sensor tower includes a stereo camera and millimeter wave modules to avoid obstacles and navigate through obscurants such as foggy environments. The onboard low-powered embedded computers Nvidia Jetson supports deep neural network computations, which can be further ported to Xilinx FPGA boards for more extreme environments. Our localization and communication module (DuckieAnchor) provides centimeter accuracy localization to support docking, marine traffic, and harbor safety, and extends the communication ranges to kilometers through XBee or a specialized WiFi device (TVL) and its amplifier. VR interfaces allow intuitive instant ship control and maneuvering in the Unity simulator with realistic vehicle dynamics and high fidelitous current, wind and sensor streams for the heterogeneous fleet of the human robot team. Duckiepond 2.0 in MOOS-DAWG22

Team NYCU for RobotX 2022 is officially announced! Thanks to
NYCU President Prof. Chi-Hung Lin,
Vice President Prof. Sin-Horng Chen,
Dean of College of Engineering Prof. Chih-Ping Lin,
Dean of College of Electrical and Computer Engineering Prof. Jenn-Hwan Tarng,
Chair of Department of Electrical and Computer Engineering Prof. Chien-Nan Liu, and
Director of Incubation Center, Prof. Fu-Hsiang Ko
for visiting our team.

Our work is built upon multi-year participations of international robotics competitions, including the RobotX and DARPA Challenges. Our design goals include: 1) modular-designed hardware of sensor tower, autonomy box, and power box for USV fleet; 2) decentrialized, learning-based colllision avoidance and goal navigation; 3) hardware-in-the-loop simulation to support learning-based developments and evaluations.

RobotX devoted to encouraging the innovators to make more substantial contributions to the robotics community. RobotX interactive forum is one of the platforms to connect and collaborate with fellow students, senior officials and industry leaders. Based on our research results, we propose a cross-domain autonomous system. Duckieboat and Duckiefloat are combined for long-term heterogenous operation. Furthermore, our poster has been selected for the moring Poster Spotlight session (Dec 5th in 2019). Our poster won the top poster.

Duckiepond is an education and research environment that includes development software, education materials, and a fleet of autonomous surface vehicles “Duckieboat.’’
Duckiepond is built upon the Duckietown and the AI Driving Olympics (www.duckietown.org]), and the goal is to provide accessible learning experiences.
The Duckieboat is built from low-cost 3D printed or commercially available parts, and includes a monocular camera, IMU, GPS, and onboard low-powered embedded computers (Jetson Nano and Raspberry Pi) that run machine learning (ML) tools.
The Duckiepond environment provides autonomy education materials for maritime missions, such as track and trail, navigation, and coordination among Duckieboats to avoid collisions using MOOS-IvP, learning-based, or combined methods.
The Duckieboat has been operating in a man-made lake, reservoir and river environments.
All software, hardware, and education materials are openly available.
IROS 2019 Paper

Team NCTU won "the best single day" award in the qualifition, and was the only first-year
team in the semi-final and final in the RobotX 2018. We ranked the 5th out of the 15 teams
of top schools from three continents around the world. The broadcast of the final is : video link here:
Welcome to Prof. Jinwhan Kim, who led Team KAIST (Korea Advanced Institute of Science and Technology) to win the 2nd place in RobotX 2014, visited Taiwan. Thanks Prof. Kim give us a talk about the reserach experience of autonomous underwater robot.

We attended MOOS-DAWG19 in Boston held by MIT and demo our Duckieboat in the Charles River, Boston. Duckiepond supports commonly used middlewares (MOOS and ROS) via a MOOS bridge, and the software packages are containerized in Docker to be deployed in real robots or simulation, such as the Gazebo environment of the Maritime Virtual RobotX (https://bitbucket.org/osrf/vrx).

Our team uses the in-campus "Bamboo Lake" as the home of the WAM-V.
We wish to make RobotX a landmark in NCTU, and therefore we will work together with students and experts who have design backgrounds. We will host a workshop aiming at forming the combination of technology and art and build a competition obsticles that's not only functional and also a piece of art work. By this, we hope to create the value of cross-domain knowledge and creativities.
When Robot Meets Art Event 2018
AUVSI awarded our team (previously known as Team NCTU) a Wave Adaptive Modular Vessel (WAM-V) in December 2017. The WAM-V is manufactured by Marine Advanced Research and costed 75,000 USD. With the same given vehicles, each team should design and implement the perception, computation, and propulsion systems of the autonomous maritime system in order to be able to participate in the competition.

Department of Electrical and Computer Engineering, NYCU

Department of Material Science, NYCU

Institute of Biomedical Engineering, NTHU

UAV advisor

Department of Electrical Engineering,R.O.C NAVAL ACADEMY

Hardware Design Lead

Control & Communication Lead

UAV & Autonomy

Perception & Autonomy

Perception

Perception & Hardware Design

Hardware Design & UAV

Autonomy

Perception

Perception

Hardware Design

Hardware Design & UAV
Perception

Perception
If you are interested, please visit our ARG-NCTU website or contact us with following information.
(EE627)1001 University Road, Hsinchu,
Taiwan 30010, ROC
Julie Ko
yutingk.ee11@nycu.edu.tw