



Competitions
Urban Circuit
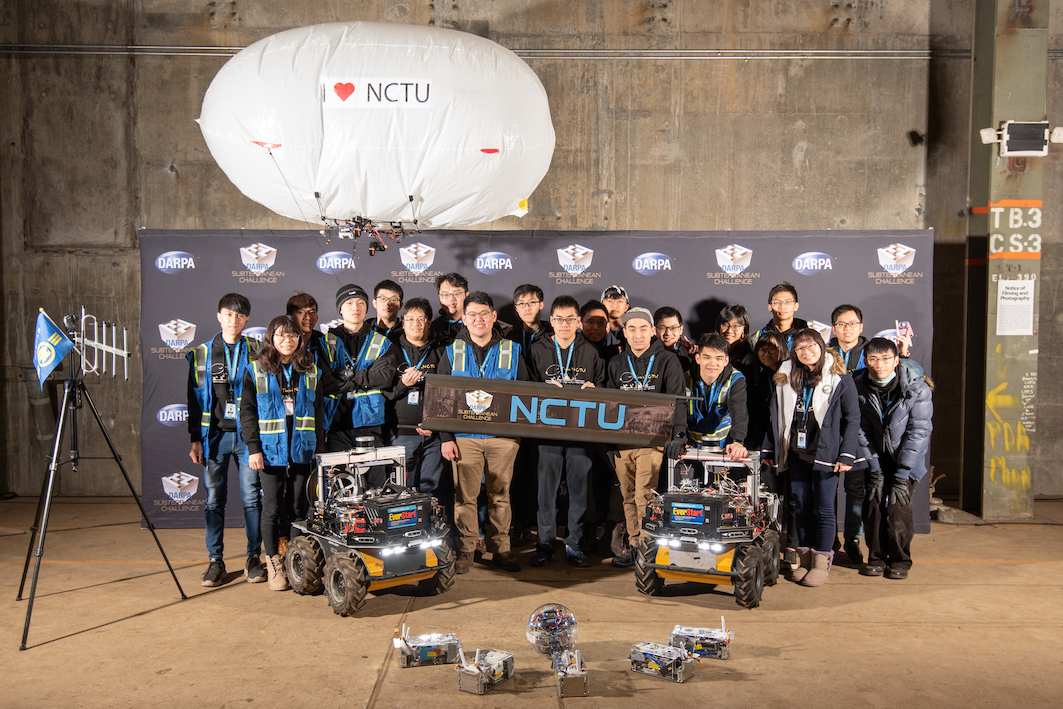
This work is the initiative of Team NCTU's participations to the DARPA Subterranean (SubT) Challenge, which is a US$2 million prize competition funded by the Defense Advanced Research Projects Agency (DARPA). DARPA is a prominent research organization of the United States Department of Defence, aiming to explore new approaches of mobility, perception, autonomy, and communication to navigate, map, and search underground environments with hazards, often too high-risk for personnel to enter. The participated teams include top universities and organization: NASA JPL, MIT, ETH Zurich, UC Berkeley, Cal Tech, KAIST etc. Team NCTU ranked the 8th among the 10 teams in the Urban Circuit in 2020.
Tunnel Circuit
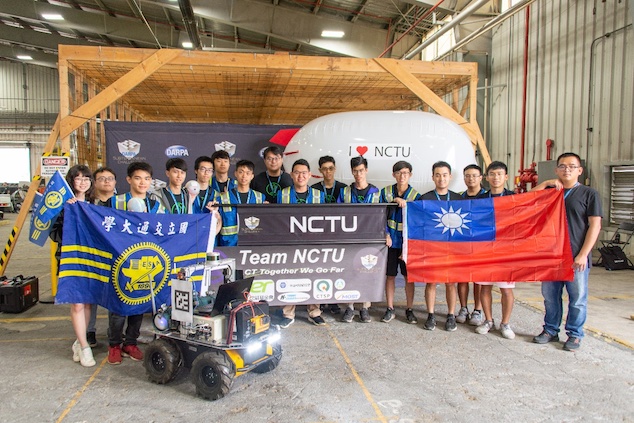
Team NCTU ranked the 7th among the 11 teams in the Tunnel Circuit in 2019 (2019-08-22). We completed the competition in the challenging underground environments with limited communication and rough terrain. We managed to make our robot to autonomously navigate and score, resulting in the 7th place among the 11 remarkable teams. Team NCTU will participate the Urban Circuit in Feb., 2020.
DARPA News: Rolling, Walking, Flying, and Floating, SubT Challenge Teams Traverse the Tunnel Circuit>Pittsburgh's NPR News: Wheels, Drones And Rescue Randy: DARPA Robotics Competition Puts Mine Rescue To The Test
Early Preparations
The Team NCTU for DARPA Subterranean Challenge is composed of graduate and undergraduate students from Institute of Electrical and Control Engineering, Department of Electrical and Computer Engineering, Mechanical Engineering, and the Robotics Institute, supervised by Dr. Hsueh-Cheng Nick Wang and 4 other faculty advisors. We hope to put together the efforts from talented and dedicated students here, and develop cutting-edge intelligent systems that solve the challenges encountering subterranean environments, where the robots must deal with rough terrain, degrading sensing, and severe communication. Our members are trained from the Duckietown platform, and some are the core member in the RobotX Competition 2018, who won the 5th place and the Best Single Day Award. There are in total 23 members in our team, including 2 engineers from our industrial partners, Acer Foundation and K-Best. The members in NCTU are developing the aspects of autonomy, perception, and mobility, whereas our industrial partners provide communication solutions. We consider the participations of the DARPA SubT Challenge both for research and education efforts. We establish internship programs to involve undergraduate students. We wish the team is student-centered, owned and run, with the help of the faculty advisors. We plan to share the efforts to the communities, publish results in top robotics conferences, and later adapt our works for real-world applications such as tunnel inspection in civil engineering and nuclear decommissioning.
Our approaches are deeply inspired by our recent work in the Duckietown & AI Driving Olympics 2018-2019, and the Maritime RobotX Competition 2018. Our long-term flight, collision-safe aerial blimp robot Duckiefloat is adapted from the Duckebot in the Duckietown platform, the miniaturized testbed to develop autonomy education and research of a fleet of robots. Duckiefloat mimics the lane following in Duckietown for tunnel following, and altitude controls from our underwater robot developed in the RobotX Competition. The Anchorball launcher on the UGV Husky is adapted from the one on our WAM-V (wave adaptive modular vehicle) in RobotX. We continue developing a revised Duckietown, including multiple robots with similar setups to Duckiefloat, artifacts, and tunnel-like environments, as a testbed for DARPA SubT Challenge.